XACT ACE® Robotic System
The world’s first and only comprehensive robotic system
Combines image-guided planning and real-time monitoring with precise robotic insertion and S-Drive™ technology to deliver instruments to the desired target in the body with enhanced accuracy, consistency, and efficiency.

Unparalleled Accuracy
Precisely reach targets – no matter the size, depth, or movement – to enable early diagnosis and treatment and help to reduce the “watchful waiting” period, improve diagnostic yield and deliver positive outcomes.

Unmatched Consistency
Delivers an instrument in one insertion to target, helping to reduce procedure complexities and duration without compromising patient outcomes.

Unlimited Efficiency
Designed to support multiple applications and indications, is instrument agnostic and has a small footprint, ensuring quick integration into a facility’s workflow.
Comprehensive Robotic System
The XACT ACE® Robotic System’s unique combination of features can overcome common challenges in accessing percutaneous procedures, getting you exactly on target, every time.
S-Drive™ Technology
When a target shifts from its planned trajectory, our proprietary S-Drive technology steers an instrument along a non-linear path so you can remain exactly on target.
There are many variables—including patient breathing, target, tissue, and anatomical movement—that can cause inconsistent results when trying to reach targets, leading to inaccurate diagnosis, delayed or suboptimal treatment, or repeat procedures.
The XACT ACE® Robotic System’s proprietary S-Drive technology provides ongoing adjustments to an instrument’s trajectory to overcome movement and more precisely reach desired targets without the need for instrument reinsertion.

Precise Robotic Insertion
The XACT ACE® Robotic System provides the opportunity to access difficult-to-reach tumors, lesions, or tissue samples. Hands-free, the robot precisely inserts and advances instruments, removing inconsistencies that can occur manually.
The robot is designed to support multiple applications and indications. It is instrument agnostic which means it uses instruments already stocked within the facility for various procedures, such as ablation, biopsy, drainage, or targeted drug delivery. This allows for quick adoption and integration into the procedure workflow.

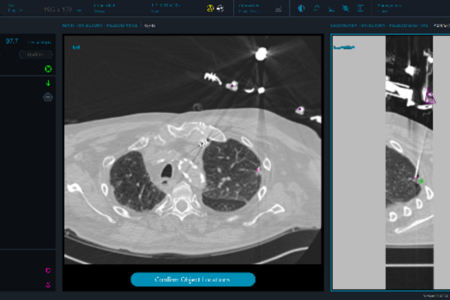
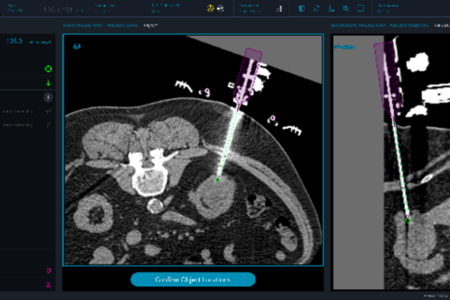
Image-Guided Planning
The XACT ACE Robotic System relies on the user’s clinical expertise to create a procedure plan for execution.
Leveraging XACT’s planning software, users transition their procedure plan to the robot for execution.
The operator selects an entry point, target, and any obstacles to calculate the procedure’s linear or non-linear trajectory.

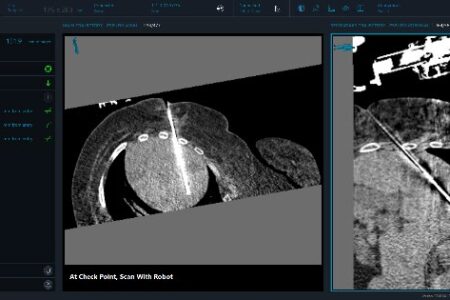
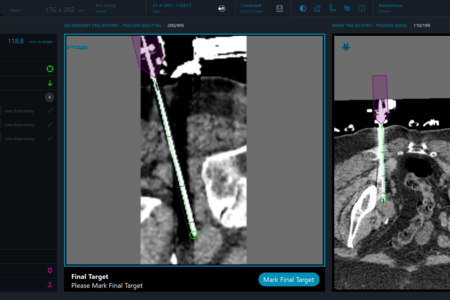
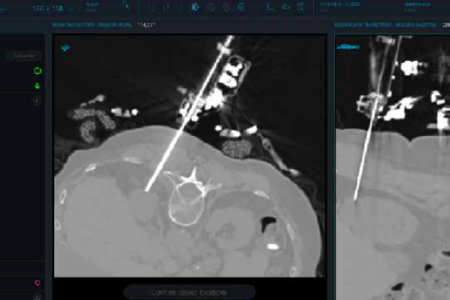
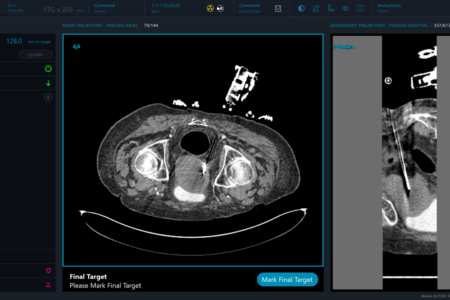
Real-Time Monitoring
With the ongoing movement of lesions, it’s vital to verify throughout the procedure that the instrument remains on target.
Real-time monitoring allows you to identify movement at any checkpoint that may occur during instrument insertion and adjust the instrument trajectory.*
Once the trajectory is adjusted, the robot leverages S-Drive™ technology to steer an instrument along a non-linear path to reach the target with unparalleled accuracy without requiring instrument reinsertion.
*Using real-time CT images taken during checkpoints

Synchronized Patient Mounting
Attaches quickly and securely to a patient, accommodating multiple anatomical positions while compensating for patient and breathing movement.
Hands-free and patient mounted, the XACT ACE® Robotic System adapts to varying body sizes and target locations.
Safe: Compensates for patient movement and breathing
Easy Set-up: Quickly attaches to the patient
All-in-One: Maximize the IR real estate with the registration element integrated directly into the ACE Robot

Clinical Experience.
Predictable and repeatable procedures help improve outcomes and patient satisfaction.
The XACT ACE® Robotic System has impressive clinical experience with unparalleled outcomes in multiple organs.
Applications.
One robotic system with multiple applications maximizes ROI potential.
Designed to support multiple applications and indications, is instrument agnostic, and has a small footprint.